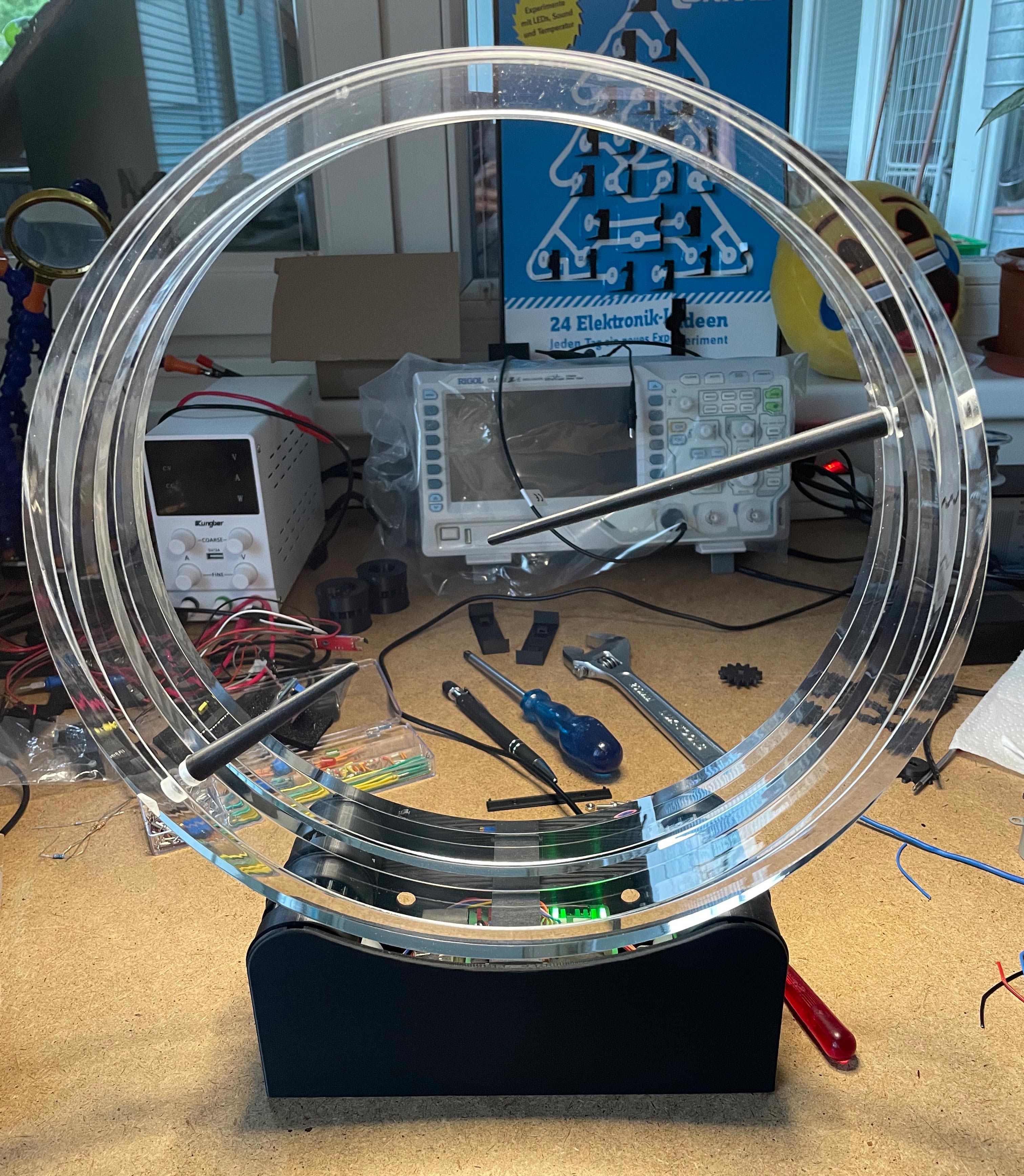
Neue Elektronik für die Raspberry Pi Uhr
Eigentlich läuft die Uhr jetzt schon eine ganze Weile ohne Probleme. Eine Kleinigkeit stört mich aber noch. Für die Uhr mit den Acryl Ringen habe ich damals auch neue Hall Sensoren bestellt. Gleiche Firma und gleicher Typ. Nach dem Einbau hat sich die Software dann aber völlig anders verhalten als bei der alten Version mit den Holzringen. Es war sogar so schlimm, dass der Raspberry regelmäßig abgestürzt ist. Nach längerer Fehlersuche habe ich schließlich die Ursache gefunden.
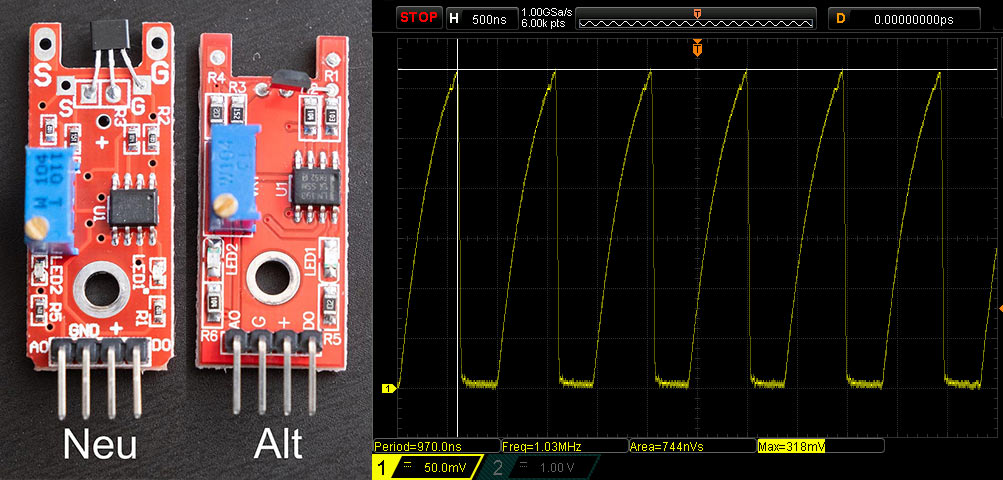
Das Problem sind eben genau diese neuen Hall Sensoren. Schon die alten Hall Sensoren neigten im Grenzbereich, wenn man sich mit einem Magneten genähert hat, zum Schwingen, aber dieser Bereich war nur wenige Millimeter breit. Bei den neuen Hall Sensoren erstreckt sich dieser Bereich über mehrere Zentimeter. Mit dem Oszilloskop kann man dieses Verhalten sehr schön sehen. Die Ursache ist mir aber unbekannt. Das Layout der Platinen ist zwar leicht unterschiedlich, aber im Grunde sind dieselben Komponenten verbaut. Vor allem der Komparator vom Typ LM393 und den Hall Sensor AH49 wird in beiden Versionen verwendet. Im Internet habe ich zwar einige Hinweise gefunden, dass der LM393 zum Schwingen neigen kann, aber warum das in der neuen Version so viel stärker auftritt kann ich nicht sagen.
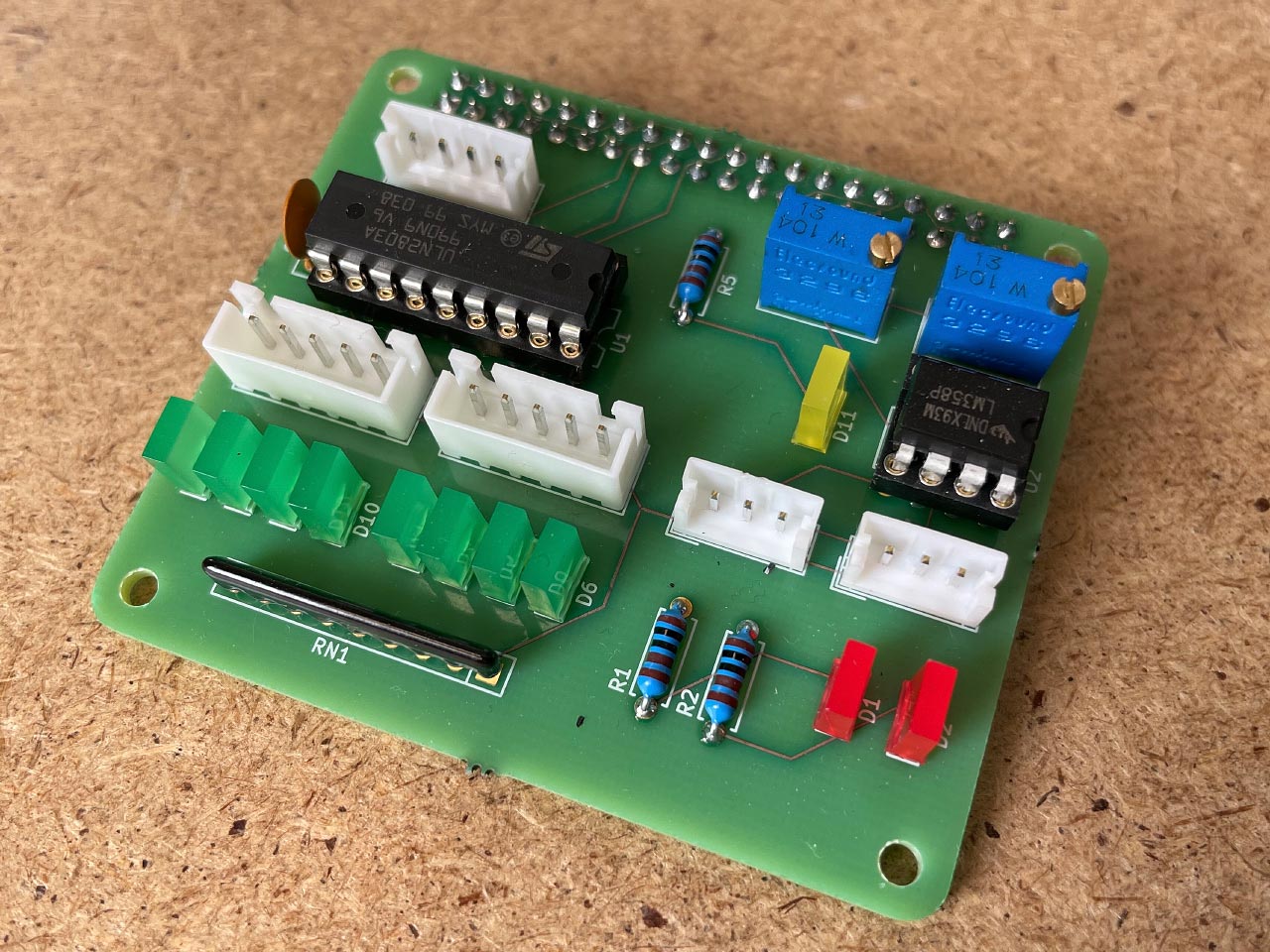
Daher habe ich beschlossen, die Schaltung neu zu entwerfen, diesmal aber mit einem Operationsverstärker vom Typ LM324. Und da ich gerade dabei war, habe ich die Schaltung gleich noch um die Ansteuerung der Schrittmotoren erweitert, damit am Ende alles auf einer Platine sitzt. Ich habe dazu KiCad verwendet, wieder ein Programm, das ich erst von Grund auf erlernen musste. Die fertige Platine habe ich von der Firma Aisler fertigen lassen und knapp zwei Wochen später war sie da. Die Bauteile waren schnell eingelötet und dann war die Platine auch schon fertig.
Die Hall Sensoren sitzen jetzt unter einem Steg. Dadurch ist die Positionierung der Sensoren viel einfacher und das Gehäuse wird noch zusätzlich stabilisiert. So ganz nebenbei schaut die Uhr jetzt auch viel aufgeräumter aus.
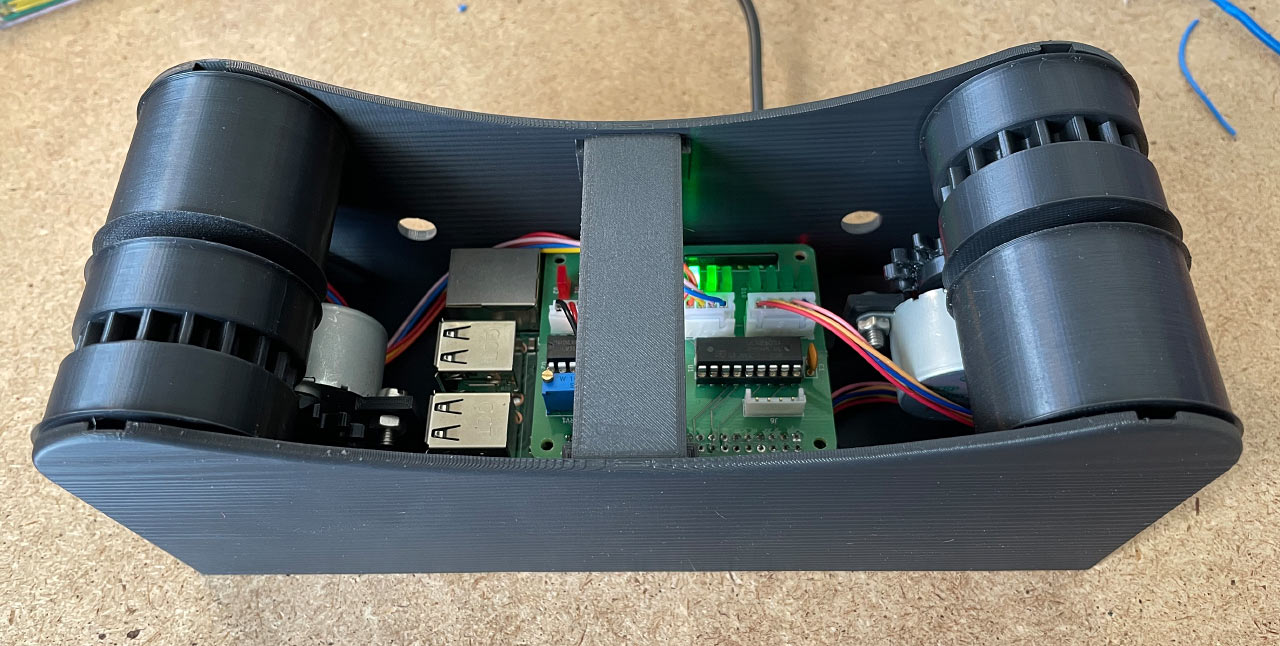
Da der Steg auch eine Halterung braucht, musste ich wieder ein neues Gehäuse 3D-drucken. Ich weiß nicht zum wievielten Mal. Einen Tag später war es fertig. Damit ist das Projekt Zyklochron vorerst abgeschlossen. Im Moment wüsste ich nichts mehr, das ich noch verbessern kann. Aber ich bin mich sicher, dass mir da noch etwas einfallen wird...