ESP32 statt Raspberry Pi für die Steuerung des Zyklochrons
Der Raspberry Pi hat bei mir inzwischen weitgehend ausgedient. Er ist zu teuer geworden und für viele Aufgaben sowieso völlig überdimensioniert. Seit einigen Wochen beschäftige ich mich jetzt mit dem ESP32, mit dem Ziel, die Elektronik des Zyklochrons zu ersetzen. Für die Steuerung einer Uhr ist der Mikrocontroller mehr als ausreichend.
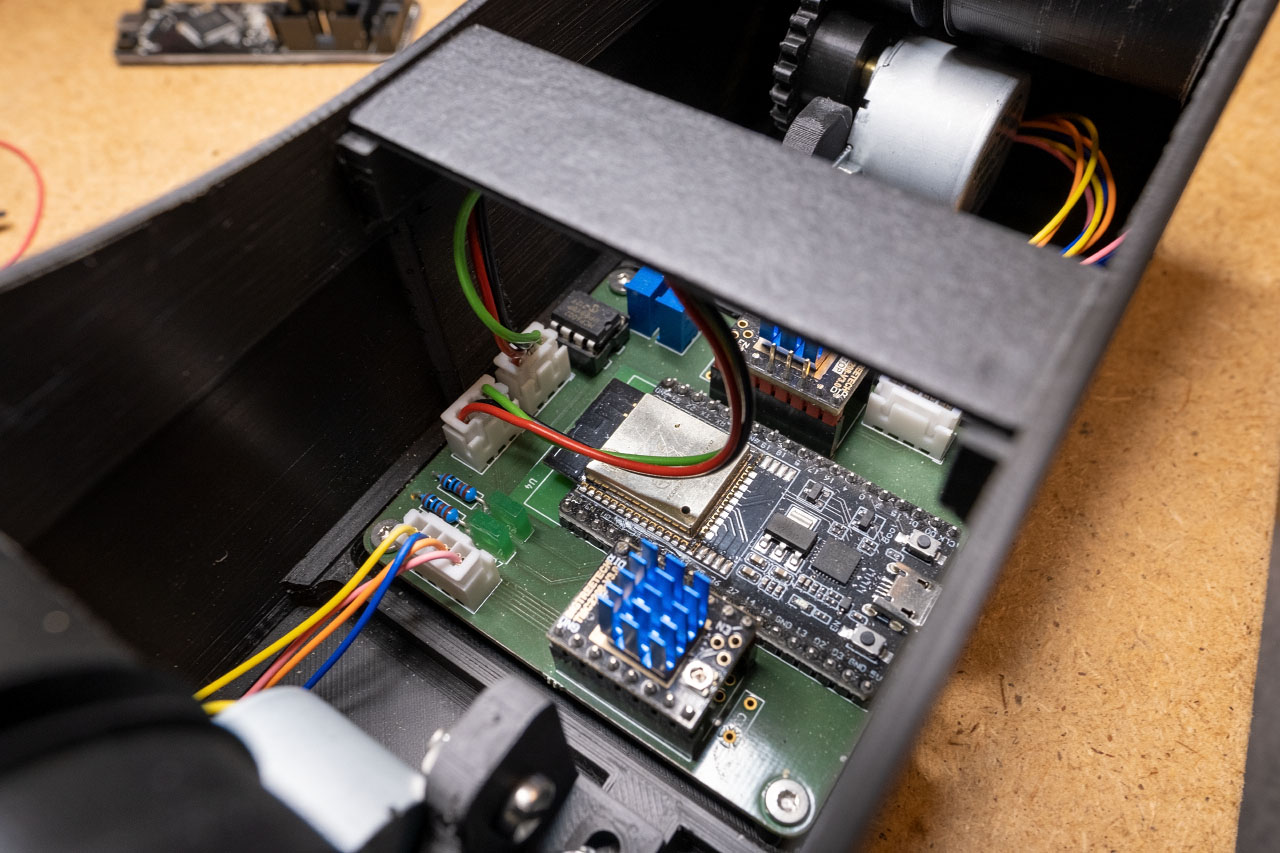
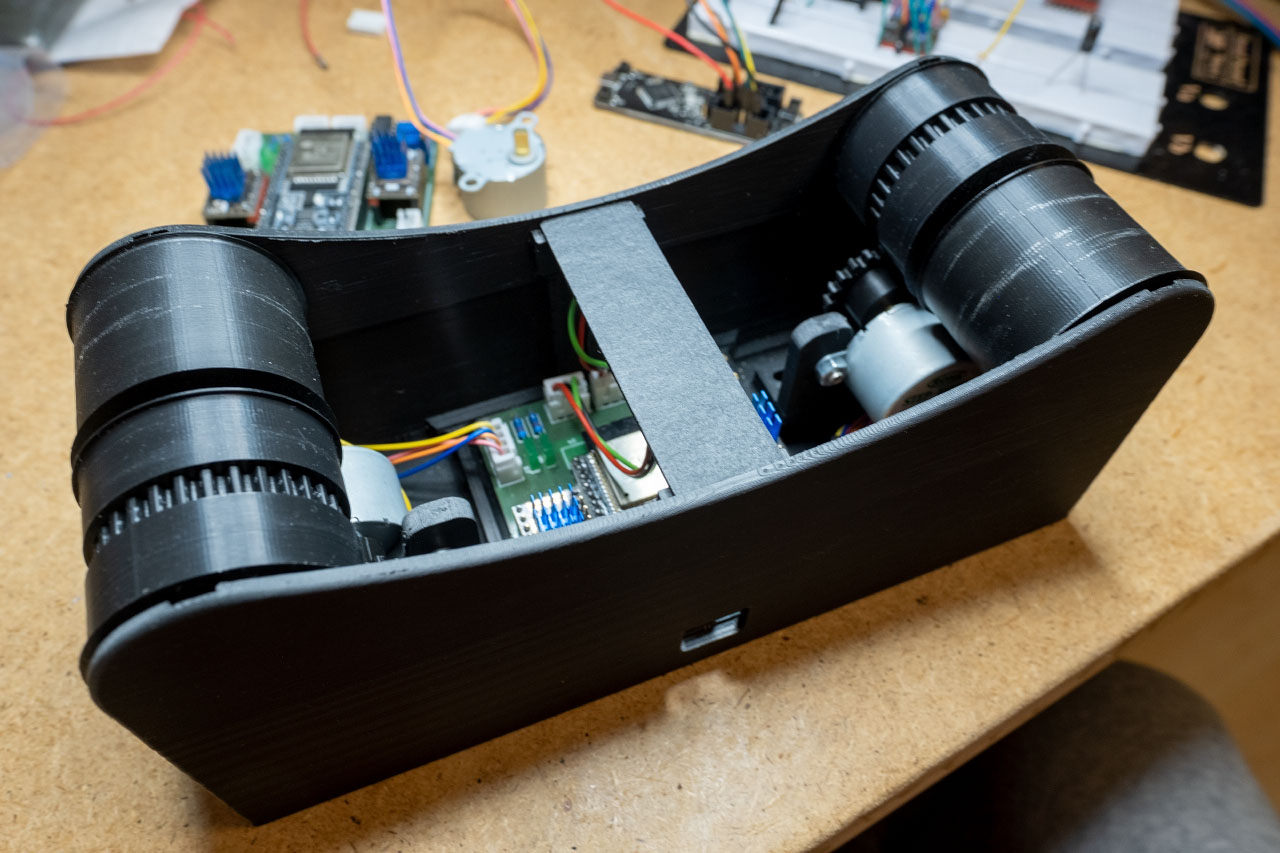
Jetzt ist die neue Generation des Zyklochrons fertig geworden. Neben dem Mikrocontroller haben sich auch noch einige andere Dinge geändert, die ich hier kurz beschreiben möchte.
Neue größere Acrylringe
Damit die Uhr noch ein wenig beeindruckender wirkt, habe ich mir größere Acrylringe bestellt. Die waren zwar wieder nicht billig, aber das war es mir Wert. Sie haben jetzt einen Durchmesser von 35 Zentimetern. Damit dürfte das Limit erreicht sein, da die Uhr jetzt äußerst waagrecht stehen muss, damit die Ringe nicht umkippen.

Neuer Treiber für die Schrittmotoren
Bisher war ein ULN2803A NPN Darlington-Transistor-Array für die Ansteuerung der Schrittmotoren zuständig. Dadurch ist bestenfalls ein Halbschritt-Betrieb möglich, was leider auch nicht zu überhören ist. Im neuen Zyklochron werden die Schrittmotoren von zwei TMC2208 Treibern gesteuert. Diese Treiber ermöglichen bis zu 256 Mikroschritte, was die Schrittmotoren praktisch unhörbar macht.
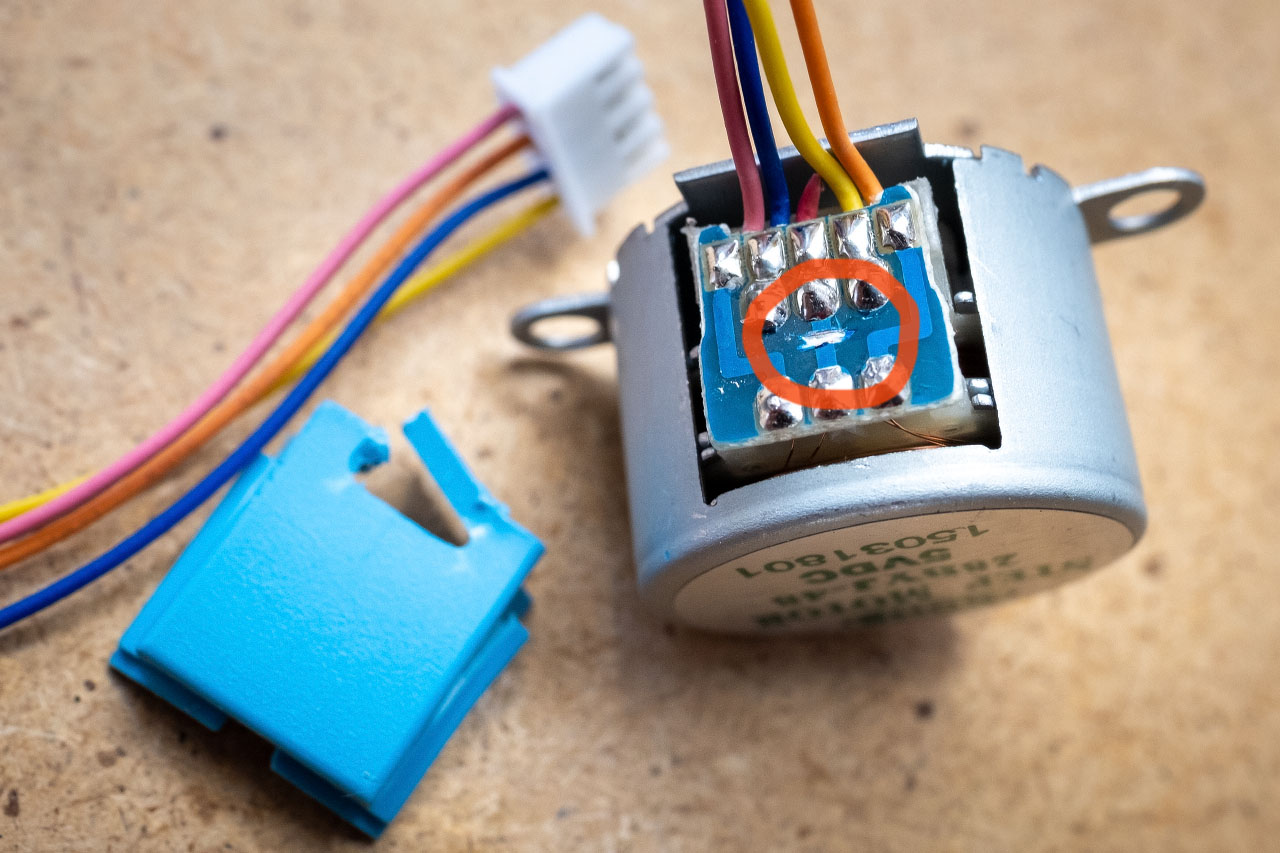
Auf Bipolar umgebaute 28BYJ-48 Schrittmotoren
Durch den Einsatz der TMC2208 Treiber ergibt sich ein kleines Problem. Die 28BYJ48 Schrittmotoren sind unipolare Motoren, der TMC2208 kann aber nur bipolare Motoren ansteuern. Glücklicherweise gibt es hier einen einfachen Trick, wie man aus dem 28BYJ48 einen bipolaren Schrittmotor machen. Dazu öffnet man zunächst die Abdeckung bei den Kabeln. Leider habe ich nie geschafft, die Abdeckung zerstörungsfrei zu entfernen, aber das stört mich nicht weiter. Danach muss mit einem scharfen Messer die mittlere Leiterbahn durchtrennt werden. Der rote Draht ist dadurch ohne Funktion und kann abgeschnitten werden. Damit ist der Motor auch schon umgebaut.
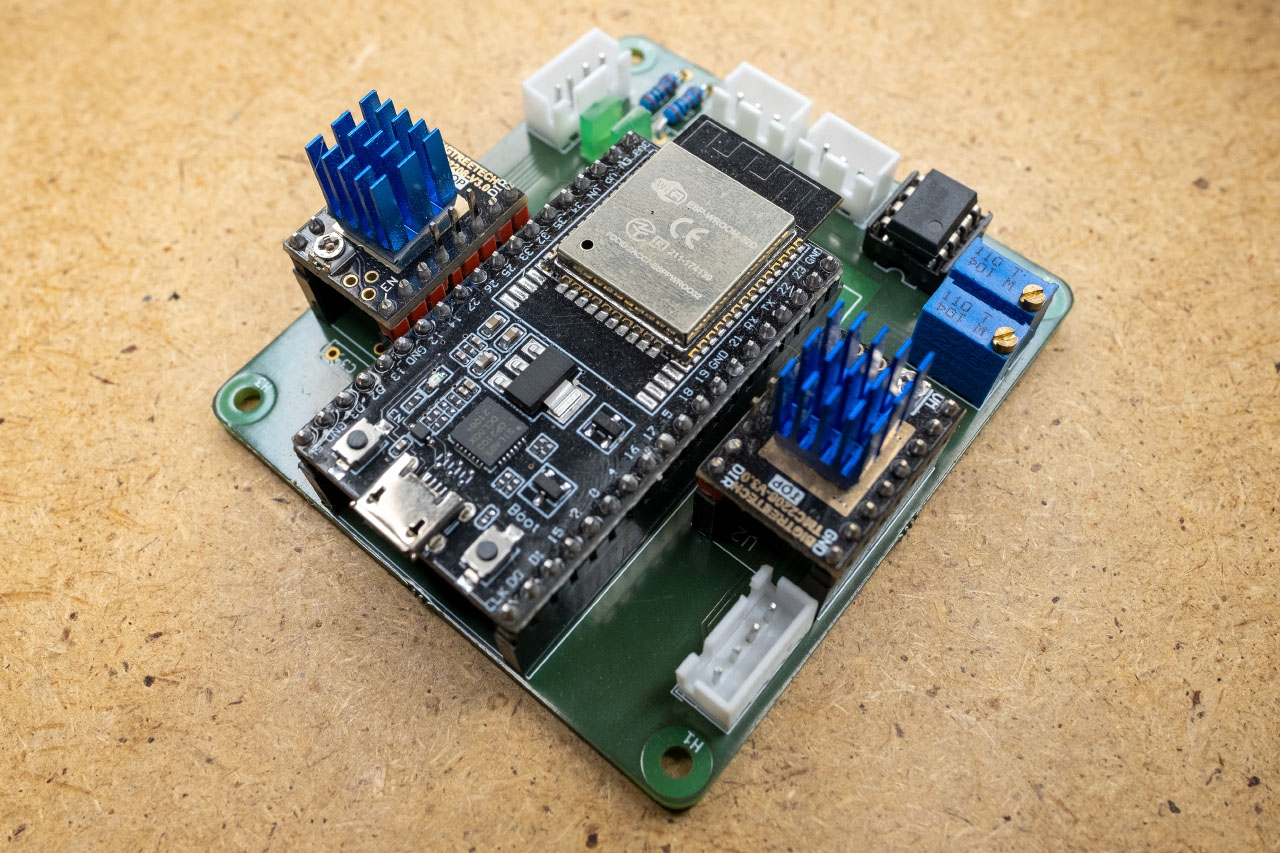
ESP32 Mikrocontroller
Die wesentliche Änderung ist natürlich der ESP32. Die komplette Schaltung musste dafür von Grund auf neu entwickelt werden. Das Ergebnis ist ein sehr kompakter Aufbau, der deutlich günstiger als die Raspberry Pi Variante ist. Bei dem Mikrocontroller Board handelt es sich um ein ESP32-DevKitC V4 von Espressif, das schon für unter 10 Euro erhältlich ist. Auch die Software musste neu entwickelt werden, da es für den ESP32 keinen Java Compiler gibt. Die neue Steuerung ist in C mit dem Espressif IoT Development implementiert.
Nach einigen Wochen intensivem Lernen, Konstruieren und Entwickeln ist das neue Zyklochron jetzt fertig. Ich bin gespannt, welche Verbesserung mir noch so einfällt...